EL-AIcar自动驾驶算法平台
系统功能概述
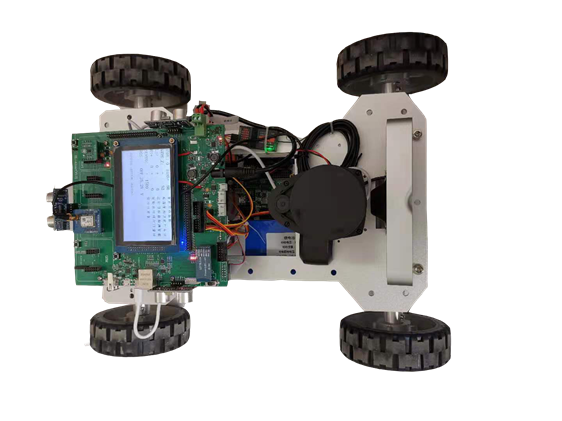
EL-AIcar自动驾驶算法竞赛平台是真正的智能车或是轮式机器人,它在传统智能车的基础上通过搭载功能强大的导航计算机,由导航计算机连接深度摄像机来实现人的双眼功能,由导航计算机连接的激光雷达对场景扫描并通过软件建模来判定障碍物位置从而实现自主导航。
导航计算机是以ubuntu为操作系统,并在其上的运行机器人的ROS系统,该ROS系统可挂接机器人建模软件来仿真设计各类机器人,也可挂接仿真软件来验证相关识别算法或控制算法从而较为直观地看到机器人模拟的运行状态,为真实机器人的设计与控制提供完备的理论基础。同时ROS系统还可以与OPENCV、TensorFlow等视频图像识别软件进行数据交互,将其AI的视觉功能发挥到极致。
车体控制单元部分采用基于ARM Cortex-M4 内核的STM32F407处理器,主要完成电源管理、电机控制及测速、红外或超声波避障、IMU姿态解算及GPS定位功能。车体控制单元通过相应接口与做AI控制的导航计算机相连,实现导航所用数据上传及接收导航计算机控制指令。同时引出407所有的GPIO引脚到排针,方便用户DIY。
系统结构及硬件资源
|
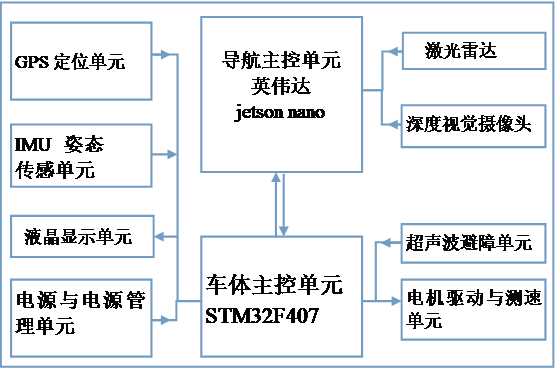
无人驾驶竞赛平台可分为室内竞赛平台与室外竞赛平台,室内平台采用英伟达Jetson nano带GPU的4核A57处理器,可自行加装语音控制单元进行控制。采用真实的四轮电动代步车平台,搭载高性能计算机、高速激光雷达与GPS单元。其硬件系统结构框图如下所示。
整车采用Coretx-M4内核的STM32F407ZE作为主控制器,同时,在小车上有丰富的外围扩展资源(如:电机控制、无线通信、液晶显示以及各种传感器模块等),它可以搭配多种传感器,自身即可完成无人驾驶智能传感小车的基本功能(包括小车前进、后退、转弯、避障等)、也可以自动驾驶(包括循迹自动驾驶、感应卡路径自动驾驶、GPS导航自动驾驶等)、同时可实现无线通信(ZIGBEE、蓝牙等无线通信控制小车方向)。 |
自动驾驶算法平台小车系统框图 |
软件配置
1、ubuntu操作系统。
2、机器人ROS系统。
3、无线遥控手柄,可实现不低于1km无线遥控。
4、移动端app可实现手机遥控和姿态遥控。
主要硬件参数说明
车身结构
车身采用全铝合金支架,带有摆式与独立悬挂,外型尺寸(长X宽445*358MM),采用直径125mm实心轮。
采用直流有刷电机(功率达35W),减速比1:27,最大速度1.3m/S,额定负载能力10Kg。带有500线AB相光电编码器。
带有阿克曼结构转向功能,采用数字舵机、金属齿轮。舵机最大角度180°,工作电压4.8-7.4V,扭力20Kg.cm。
采用共轴摆式悬挂,可适应不平地面。
车身四周有四组超声波测距模块,采用HY-SRF05 超声波测距模块,2cm-450cm 的非接触式距离感测功能, 测距精度可达高到3mm
带有GPS定位系统:56通道,GPS L1(1575.42Mhz) C/A码,定位精度: 2.5mCEP(SBAS:2.0mCEP),通信协议: NMEA(默认)/UBX Binary ,SBAS:WAAS/EGNOS/MSAS,更新速率: 最大5Hz(默认1HZ)。
激光雷达:思岚A1
测距范围:0.15-12m,基于白色高光反色物体测得;
扫描角度:0-360;
测距分辨率:当测量物体在1.5米范围内分辨率为小于0.5mm;否则分辨率小于实际距离的1%;
测量频率:2KHz-8KHz;
扫描频率1-10Hz;
供电:5V
视觉相机:Astra pro
深度范围:0.6-8m;
功耗:≤2.5W,峰值电流小于500ma;
彩色图分辨率:1280x720@30FPS;640x480@30FPS;320x240@30FPS;
深度图分辨率:1280x1024@7FPS;640x480@30FPS;320x240@30FPS;160x120@30FPS;
精度:距离物体1m时,±1-3mm;
彩色FOV:H66.1’ V40.2’;
深度FOV:H58.4’ V45.5’;
数据传输:30-45ms;
供电:USB 5V
英伟达jetson nano B01:
CPU:ARM Coretex-A57 64-bit ,主频1.43Ghz;4核,
GPU:128-core Maxwell @921Mhz;
内存:4 GB 64-bit LPDDR4 25.6 GB/s;
存储:可扩展microSD卡,要求最小16GB UHS-1(超高速接口,带宽能达到至少104Mb/s)
视频编码:H.264/H.265(4Kp30)
视频解码:H.264/H.265(4Kp60,2**4Kp30)
摄像输入接口:MIPI CSI
摄像输出接口:2个HDMI 2.0,Edp1.4
网络接口:Gigabit Ethernet/M.2 Key E
USB:4个 USB 3.0, USB 2.0 Micro-B
GPIO引脚:40
额定功率:5w/10w
供电:5V
电池采用22.2V 5000ma带保护电池,续航能力约5小时(电池容量可选)
车体主控STM32F407ZE:
CPU:支持最大主频为168 MHz的ARM Cortex-M4内核
内存:1024KByte FLASH,192+4KByte SRAM
LQFP-144封装。
4个传感器接口,可扩展20多种传感器。
1个4.3寸TFT液晶,分辨率480*272。
1组无线通信总线,可扩展Zigbee、CC1310、蓝牙通信。
外设资源包括6个USART、12个16位的定时器、2个32位定时器、2个DMA控制器(16通道)、3个SPI、2个全双工I2S、3个I2C、2个CAN、3个12位ADC、2个12位DAC、SDIO、1个FSMC接口、2个USB(支持HOST/SLAVE)、1个摄像头接口、1个硬件随机数生成器以及1个10/100M以太网控制器等
可开设的实验项目
| 基于AI CPU系统深度学习算法实验 | |||
| 实验01 构造线性回归模型 | 实验02 逻辑回归框架 | 实验03 迭代完成逻辑回归模块 | 实验04 神经网络模型架构 |
| 实验05 训练神经网络 | 实验06 卷积神经网络模型架构 | 实验07 RNN网络模型 | 实验08 循环神经网络LSTM |
| 实验09 双向循环神经网络 | 实验10 动态循环神经网络 | 实验11 对抗生成网络 | 实验12 目标识别 |
| 实验13 自编码器 | |||
| 基于AI CPU系统应用实验 | |||
| 实验01 GoogleNet物体识别 | 实验02 FaceNet120人脸检测 | 实验03 神经网络Lenet模型 | 实验04 手语识别 |
| 实验05 色块跟踪 | 实验06 视觉建图 | 实验07 激光雷达建图 | |
| 基本功能实验 | |||
| 实验一 小车前进实验 | 实验二 小车后退实验 | 实验三 小车左转实验 | 实验四 小车右转实验 |
| 实验五 自动避障实验 | |||
| 自动驾驶实验 | |||
| 实验一 循迹自动驾驶实验 | 实验二 GPS导航自动驾驶实验 | ||
| 无线通信实验 | |||
| 实验一 无线通信控制方向实验 | |||
| 传感器实验 | |||
| 实验一 继电器实验 | 实验二 光照度实验 | 实验三 温湿度实验 | 实验四 红外测温实验 |
| 实验五 气压计实验 | 实验六 摄像头实验 | 实验七 GPS实验 | |
产品参考图片
相关产品推荐
EL-SCAT-III自动控制/计算机控制/信号与系统三合一教学实验系统
EL-SCAT-III自动控制/计算机控制/信号与系统三合一教学实验系统该产品是为配合《信号与系统》、《自动控制》、《计算机控制》课程的教学而研制开发的教学实验装置。
EL-IMP-900智能移动终端开发平台实验系统
EL-IMP-900是一款以三星 S5P6818高性能的八核 Cortex-A53为 核心的嵌入式智能移动终端开发平台。
EL-PDS-I项目式创新竞赛开发平台
项目式创新竞赛开发平台是属于一种综合的创新开发套件,该套件支持EXP-89S51、EXP-STM32F107、EXP-STM32F407、EXP-WirelessMCU-CC1310、EXP-WirelessMCU-CC2530、EXP-Wire...