人形机器人实验系统EL-Irobot
系统功能概述
EL-Irobot型教学实验系统是属于一种综合的教学实验系统,该平台支持EXP-89S51、EXP-STM32F107、EXP-STM32F407等CPU板,实现了多模块的应用实验。
它是集单片机、机器人用舵机、常用传感器的学习、应用编程、开发研究于一体的多功能创新平台。实验平台分为EL-Irobot-I和EL-Irobot-II两套,分别采用PWM标准舵机和串行总线舵机,每套18个自由度。
实验平台除了可以用来学习PWM标准舵机和串行总线舵机的控制协议,还可以配合各种常见传感器来控制机器人行走等各种动作。实验平台搭载有1个MPU6050六轴运动传感器、2个HY-SRF05超声波测距模块、1个Pixy CMUcam5 图像识别传感器、1个1838红外接收头、1个HC-05蓝牙遥控模块、一个PS2无线游戏手柄和2块MF RC522读写卡模块,可以完成基于CPU硬件资源的基础性实验、基于两种舵机的人形机器人肢体控制实验以及外拓传感器实验等等。
|
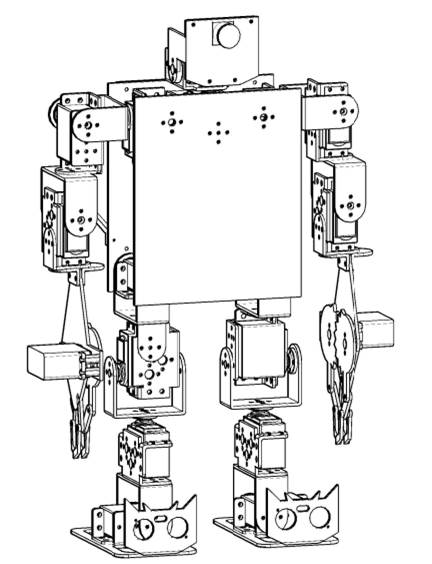
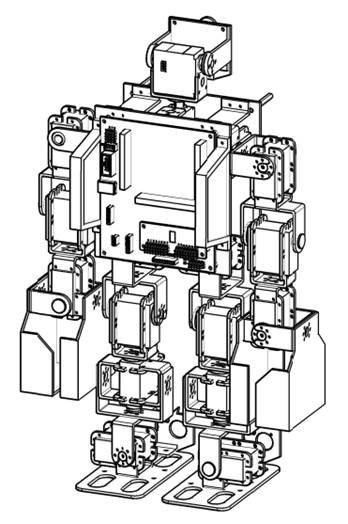
EL-Irobot-I正面效果图 |
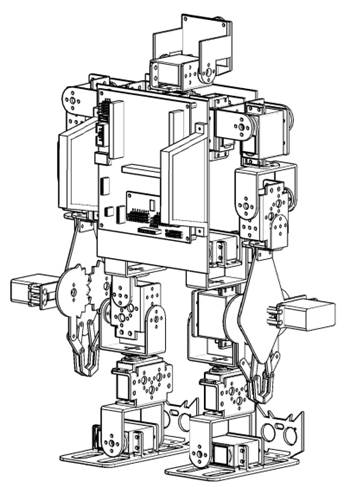
EL-Irobot-I背面效果图 |
|
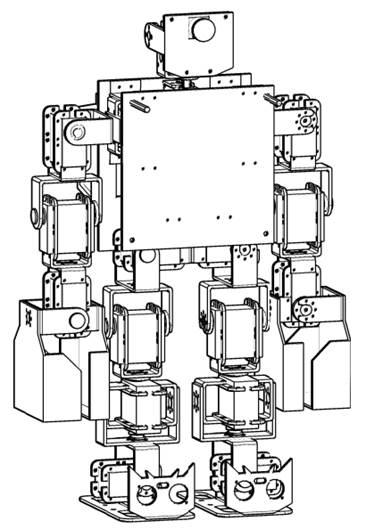
EL-Irobot-II正面效果图 |
EL-Irobot-II背面效果图 |
硬件资源
平台硬件资源:
CPU:支持EXP-89S51、EXP-STM32F107、EXP-STM32F407;
传感器部分:
(1)、1838红外接收模块,NEC编码遥控器
(2)、HC-05汇承蓝牙模块,基于 Bluetooth Specification V2.0 带 EDR 蓝牙协议,工作频段为 2.4GHz ISM,调制方式是 GFSK。模块最大发射功率为 4dBm,接收灵敏度-85dBm,板载 PCB 天线,可以实现 10 米距离通信。
(3)、Pixy CMUcam5视觉追踪模块,传输速率1Mbits/s,即每秒可以发送超过6000个识别的物体或每帧135个被识别的物体(Pixy每秒可以处理50帧画面),支持SPI,I2C,UART或模拟/数字 I/O口(通过10Pin接口)、USB2.0等通信方式。
(4)、MPU6050六轴运动传感器,是 InvenSense 公司推出的全球首款整合性 6 轴运动处理组件,可实时测量3轴陀螺仪和3轴加速度传感器以及温度传感器;
(5)、HY-SRF05 超声波测距模块,2cm-450cm 的非接触式距离感测功能, 测距精度可达高到3mm。
(6)、PS2无线手柄,采用2.4G技术,遥控距离可达15米;
(7)、MF RC522 ,是13.56MHz 非接触式通信中高集成度读写卡系列芯片,是NXP 公司针对“三表”应用推出的一款低 电压、低成本、体积小的非接触式读写卡芯片,利用了先进的调制和解调概念,完全集成了在13.56MHz 下所有类型的被动非接触式通信方式和协议,支持 ISO14443A 的多层应用,快速CRYPTO1 加密算法,双向数据传输速率高达424kbit/s。
该平台可支持多种CPU板卡,并且所有板卡可以独立供电,单独使用,方便进行二次开发、课程设计、毕业设计,参加电子竞赛。
可开设的实验项目
|
机器人肢体动作控制实验 | |||
| 实验一 舵机PWM控制实验 | 实验二 PCA9685驱动实验 | 实验三 串行总线舵机驱动实验 | 实验四 机器人单臂动作控制实验 |
| 实验五 机器人双腿动作控制实验 | 实验六 机器人头部视觉追踪实验 | ||
|
机器人用传感器实验 | |||
|
实验一 机器人红外遥控实验 | 实验二 机器人行走避障实验 | 实验三 机器人身体平衡自调节实验 | 实验四 机器人视觉追踪实验 |
|
实验五 机器人蓝牙遥控实验 | 实验六 机器人PS2无线遥控实验 | 实验七 机器人感应卡自动导航实验 | |
|
综合功能实验 | |||
|
避障+导航+蓝牙/PS2手柄/红外遥控+平衡保持+视觉追踪综合实验 | |||
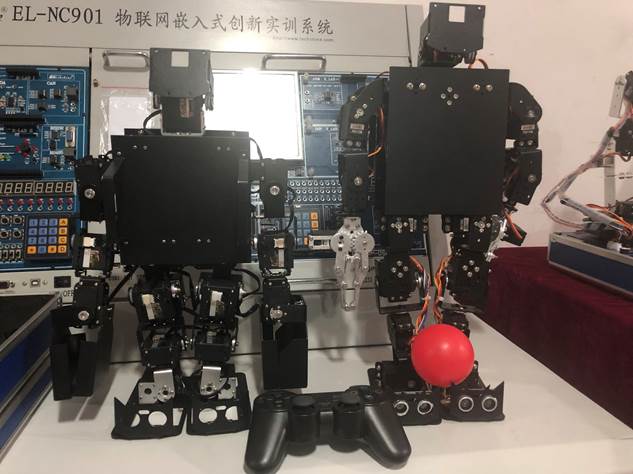
机器人实物图